
Case
Ponsse
Responsible collaboration for specific machining needs
Ponsse, which specialises in cut-to-length forest machines, is one of the leading machinery manufacturers in its industry. Ponsse’s operations revolve around producing sustainable solutions for the benefit of their customers and the environment.
Responsible collaboration for specific machining needs
Ponsse, which specialises in cut-to-length forest machines, is one of the leading machinery manufacturers in its industry. Ponsse’s operations revolve around producing sustainable solutions for the benefit of their customers and the environment.
Collaboration with Jucat initially began with the need to develop frame production. Nowadays Ponsse’s production involves several of Jucat’s welding automation processes.
“Collaboration with Jucat has gone well. Ponsse is a very customer-oriented company, and we always want to keep our promises to our customers. We also want our goods suppliers and partners to share the same principles in their own operations. In this industry, Jucat is just as responsible a company as we are. They keep their promises and make things work,” says Ponsse’s production development manager, Heikki Selkälä.
Device configurability and customer orientation are key
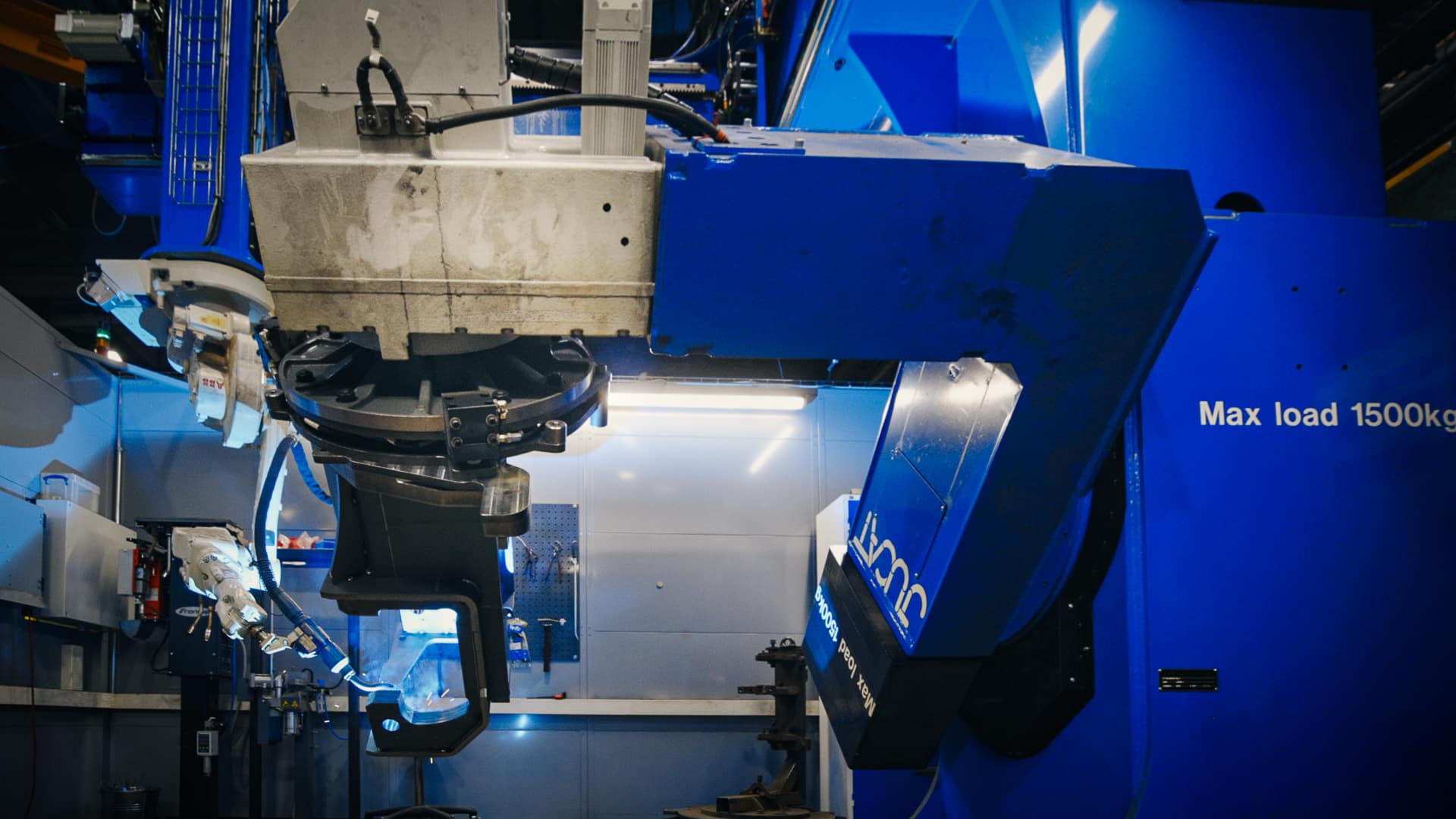
“Jucat has helped us with welding automation in particular. We handle and position heavy parts during device manufacturing, and this is now easier to do. Jucat uses ABB robots in its welding cells. These robots can be highly configured to mean precise needs. Without these robot cells, it would be almost impossible to make these machines,” adds Selkälä, referring to the welding automation cells, which contain both positioners and welding robots.
Welding cells are a fixed and sustainable part of Ponsse’s production
“The robots have significantly changed the way that components are made in Ponsse’s production. When we invest in robot welding, one of the aims is to help our welders to get more out of their work for less.” Selkälä sums up the collaboration between the companies in a single sentence: “Jucat is a very customer-oriented company and its robot welding cells are well-made and durable.”




